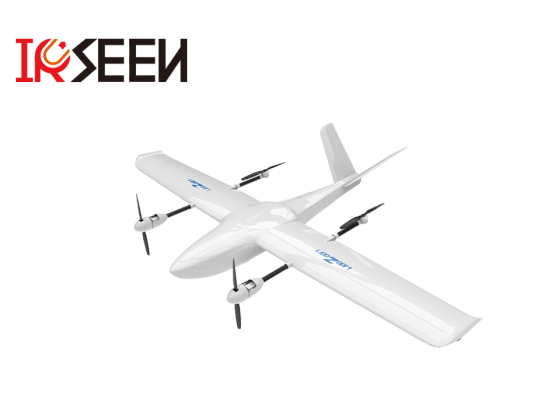
Multirrotor vectorial
El UAV de múltiples rotores está diseñado con una estructura de fuselaje extremadamente liviana para mantener la resistencia y ahorrar el mayor exceso de peso posible para las cargas de la misión y los sistemas de batería para extender el tiempo de funcionamiento inactivo.
- IRSEEN
- Shenyáng, China
- información
Multirrotor vectorial
Introducción
El UAV de múltiples rotores está diseñado con una estructura de fuselaje extremadamente liviana para mantener la resistencia y ahorrar el mayor exceso de peso posible para las cargas de la misión y los sistemas de batería para extender el tiempo de funcionamiento inactivo.
El sistema UAV se compone principalmente de una plataforma de vuelo UAV, un sistema de carga útil de la misión, un sistema de estación terrestre y una plataforma de gestión de big data en segundo plano.
El UAV está diseñado en base al concepto de diseño modular, que puede transportar de manera flexible diferentes equipos de misión aerotransportados (como un módulo de cámara de una sola luz, un módulo de vaina de múltiples luces, etc.) para ser aplicado a diferentes tareas y tiene la capacidad de multi- aplicación de escena.
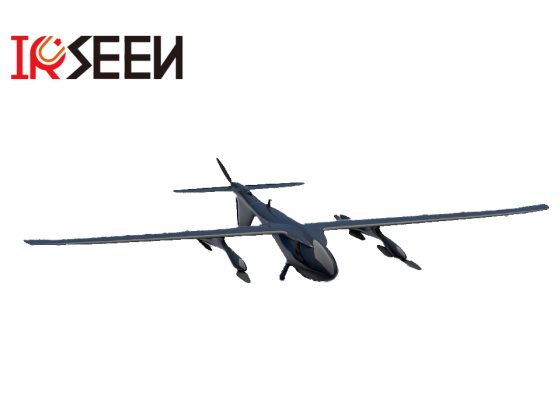
Es de tamaño pequeño y peso ligero, y puede ser transportado por una sola persona para completar la inspección del área de trabajo designada.
El UAV es fácil de usar, fácil de instalar, flexible, se puede implementar en poco tiempo y se puede usar ampliamente en una variedad de misiones aéreas como patrulla de asalto, reconocimiento y búsqueda.
Funciones
Tamaño máximo 800*600*400(mm)
Carga de la misión 5,2 kg
Tiempo de vuelo 44min
La altitud máxima de vuelo es de 2000 m.
La altitud máxima es de 5000m
Precisión de desplazamiento del GPS vertical:±0,5 m horizontales±1,5 metros
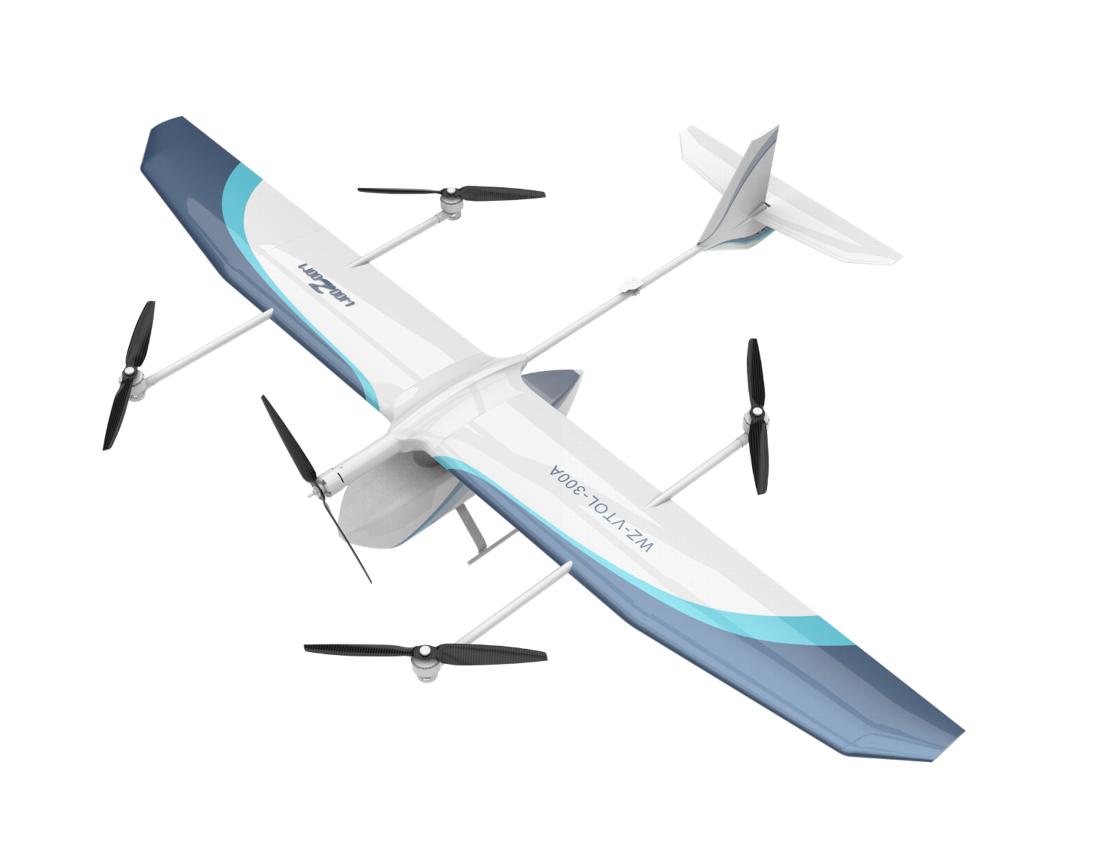
Parámetros
proyecto | parámetro |
Diámetro del rotor | 381 mm |
Tamaño corporal | 800 mm * 800 mm * 295,1 mm |
peso sin carga | 4,5 kg |
carga útil | 2kg |
Tiempo máximo de vuelo | 30 minutos |
Velocidad máxima de vuelo | 20 m/s |
Altitud máxima | 4000m |
Radio de tarea | 5km |
Precisión de desplazamiento del GPS | Vertical±0,5 metros |

NETD es la diferencia de temperatura equivalente al ruido de la cámara de infrarrojos, que es uno de los principales indicadores de los detectores de infrarrojos. NETD es un índice de evaluación objetivo para la sensibilidad de un sistema de imágenes térmicas y se puede utilizar para predecir la distancia de detección de un objetivo de punto de pequeña diferencia de temperatura. El valor NE...more