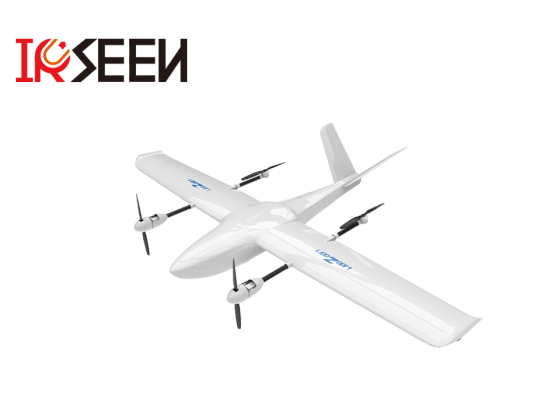
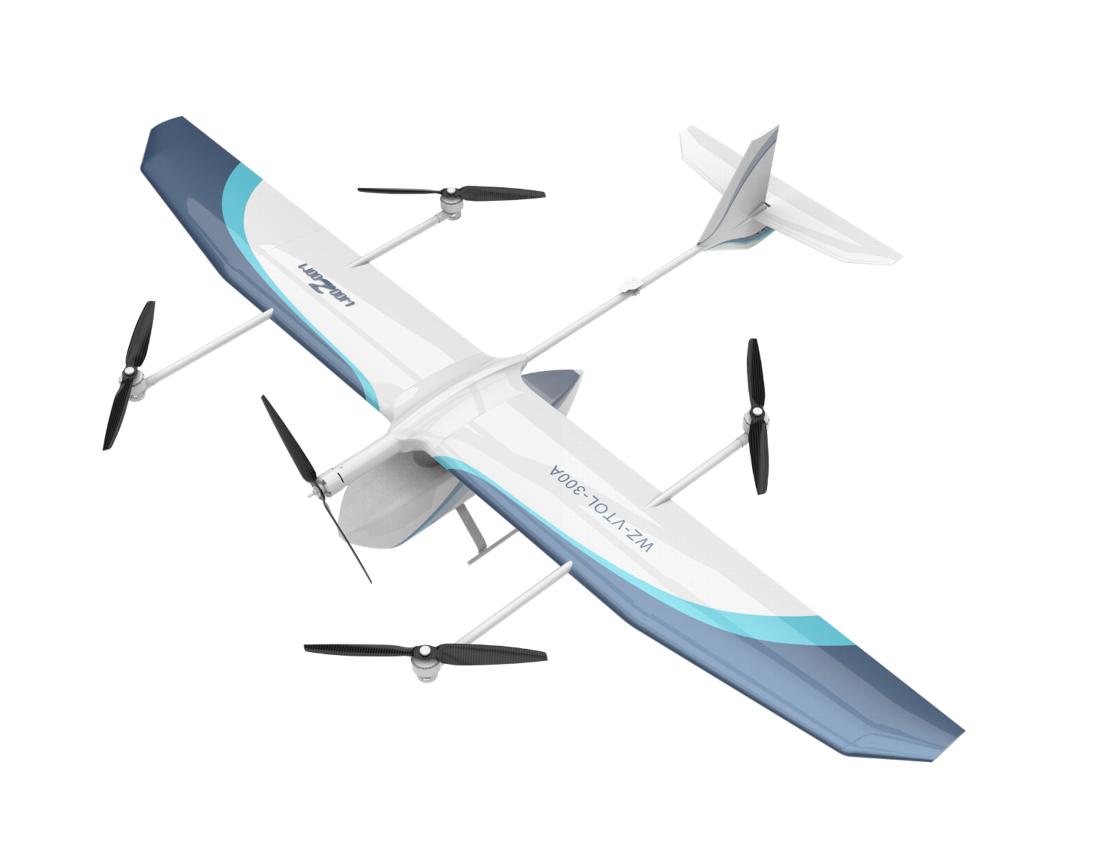
Despegue y aterrizaje vertical eléctrico puro UAV-p4
Nuestros ingenieros han aplicado diseños aerodinámicos avanzados y diseños industriales audaces, incluida la cola invertida fijada a la aeronave como tren de aterrizaje, que equilibra el peso de la aeronave y garantiza un vuelo estable con carga máxima; El fuselaje estratificado de la serie P minimiza la resistencia aerodinámica y aumenta drásticamente la velocidad de crucero, aumentando la relación sustentación-resistencia a 21 (en comparación con 18 en un Boeing 747).
- información
UAV eléctrico puro de despegue y aterrizaje vertical
Introducción
Tecnología aerodinámica líder con
Excelente relación sustentación-resistencia
Nuestros ingenieros han aplicado diseños aerodinámicos avanzados y diseños industriales audaces, incluida la cola invertida fijada a la aeronave como tren de aterrizaje, que equilibra el peso de la aeronave y garantiza un vuelo estable con carga máxima; El fuselaje estratificado de la serie P minimiza la resistencia aerodinámica y aumenta drásticamente la velocidad de crucero, aumentando la relación sustentación-resistencia a 21 (en comparación con 18 en un Boeing 747).
Construcción ligera, fuerza pesada
Con una mejor estructura y diseño aerodinámico, los UAV de la serie P tienen un excelente rendimiento de resistencia al viento y pueden soportar cargas de hasta 6 g después de las pruebas de laboratorio; La capacidad de carga útil y resistencia del UAV eléctrico puro de clase de 15 kg es la más alta.
Una variedad de cargas, puedes elegir
Los módulos de carga útil que proporcionamos han sido rediseñados para permitir un rápido reensamblaje para cumplir con diferentes requisitos. Hay módulos fotoeléctricos, cámaras ortográficas, cámaras de inclinación, cámaras multiespectrales y lidar.
parámetro
4Tiempo de navegación efectivo (montaje 1Kg)
300kmAlcance máximo
Distancia máxima de transmisión de datos de 100 km (30/60 opcional)
7500m Techo práctico
6kgCarga máxima
envergadura | ≤3 metros |
capitán | ≤ 1,9 m |
altura | ≤ 0,4 metros |
Modo de despegue y aterrizaje | Despegue y aterrizaje vertical autónomo sin control remoto |
Peso al despegar | 15 kg o menos |
Tiempo de vuelo | ≥ 4,5 h (transportando 1 kg de carga)/ ≥ 1,5 h (transportando Lidar) |
Velocidad de crucero | 65 km/h-150 km/h |
Altura práctica del techo | ≥ 7500m sobre el nivel del mar |
Resistencia al viento | Etapa de aterrizaje del rotor 6, etapa de crucero 8 contra el viento, 6 viento cruzado |
Temperatura de funcionamiento | 20 ℃ por debajo de cero a 50 ℃ por encima de cero |
Tiempo de respuesta de la tarea | Desplegar ≤3 min, retirar ≤3 min |
Módulo de carga | Módulo de reconocimiento aéreo de soporte de tipo de mapeo/módulo de inclinación/módulo de detección remota Lidar/luz múltiple Módulo de espectro, tipo de seguridad compatible con intercambio de luz simple/luz doble/tres luces |
Control de navegación | Sistema de navegación de doble frecuencia compatible con GPS/Beidou/GLONASS |
sensor de actitud | No menos de 3 canales de diseño de sensor redundante |
Modo de Tarea | Se admite el modo de tarea completamente automático |
Mecanismo de seguridad | Soporta viento anómalo regreso a casa, pérdida de GPS bajando hover, contacto perdido regreso a casa automático,Función de soporte de cálculo automático de potencia |

NETD es la diferencia de temperatura equivalente al ruido de la cámara de infrarrojos, que es uno de los principales indicadores de los detectores de infrarrojos. NETD es un índice de evaluación objetivo para la sensibilidad de un sistema de imágenes térmicas y se puede utilizar para predecir la distancia de detección de un objetivo de punto de pequeña diferencia de temperatura. El valor NE...more